

关注信息与智能机电学院公众号
时间:2022-03-14 点击:
2022年3月13日上午九点,信息与智能机电学院于智能制造创新工场(大象楼)举办第十届全国大学生机械创新设计大赛厦门华厦学院校赛。本次莅临现场的评委老师有:周海波老师,万瑾老师,王亚凡老师,谭文奇老师,欧阳溯老师;线上评委老师有:宁静老师、邓鹭涛老师、王慈老师、洪如老师,卢月红老师、林贵堃老师。

本次比赛的主题为:自然、和谐。赛道一是设计与制作模仿自然界动物的运动形态和运动特点的机械装置。赛道二是设计与制作用于修复自然生态的机械装置,包括防风固沙、植被修复和净化海洋污染物的机械装置。

每一组成员将派出一名代表上台演示,汇报本组的选题、详细的设计方式以及实践成果。汇报结束后,本组选手全部上台,由各位评委老师进行点评、提问,然后打分。
以下是四个小组汇报的选题、设计方式以及实践成果。
第一组
王书宇小组
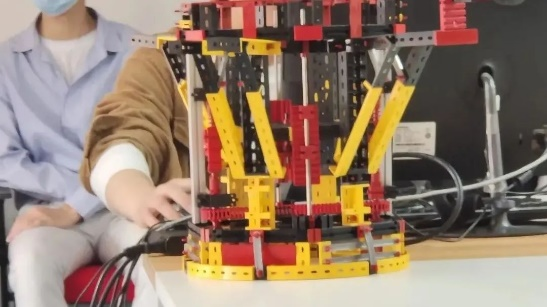
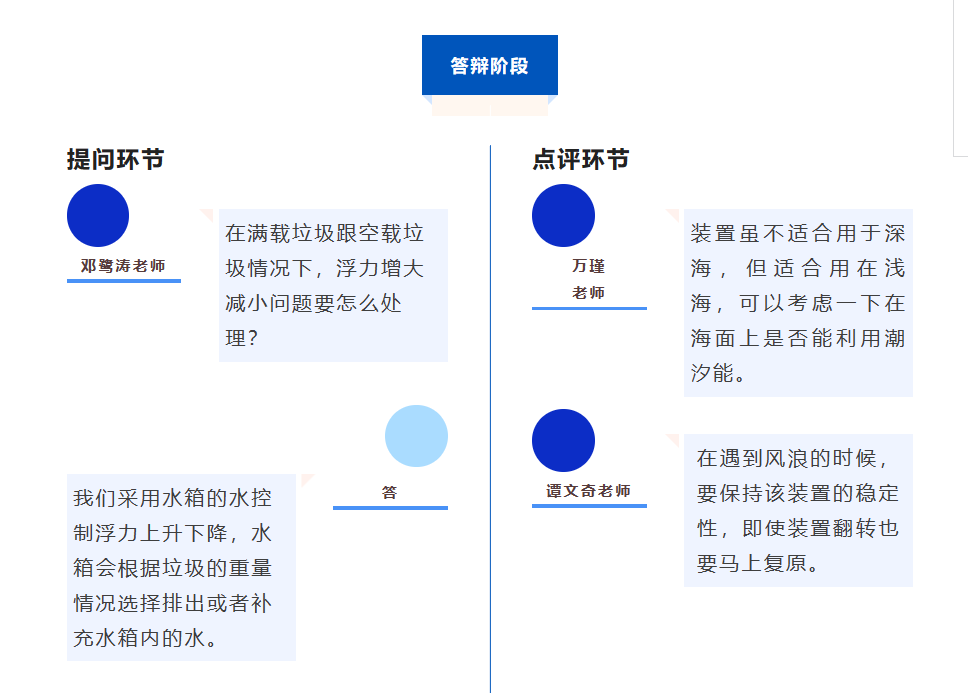
设计装置:海洋垃圾收集装置
该装置漂浮在海洋上,用于海洋漂浮垃圾的收集,设有叶轮,可将动能回收,清理滤网。该装置分为外桶和内桶,内桶在固定的水位上进行升降。
该装置的四个创新点:
1.漂浮的水箱使装置漂浮在海面上。
2.利用螺旋装置移动内筒。
3.装置上设计设置太阳板,增加可拓性。
4.设有叶轮,可进行动力回收,用于清理滤网。
第二组
陈跃辉小组

设计装置:仿蟹钳模型垃圾收集装置
设计用途:用于清理沙滩垃圾。
设计原理:该装置类似于家用扫地机器人,全自动智能型。底部类似于挖掘机履带传动装置,在沙滩上起到防滑效果。装置的上部放置一个梯形的无盖垃圾收集箱。收集箱下面增加一个液压杆,可以类似于卸货的方式倒掉收集到的垃圾。仿蟹钳手臂可以进行360度旋转,更易于全方位无死角收集垃圾。
第三组
黄俊贤小组
设计装置:仿海羽星模型水下拍照装置
特点:形似水草具有隐蔽性。通过触手的摆动带动自身的向上浮力,移动也是靠触手的轨迹实现,进而减少涡轮的噪音污染,更好的贴合环境,跟踪鱼群动向;同时可掌握洋流的动态,了解海洋环境。
方案设计:设计重点是触手传动。
第四组
叶烝佐小组

设计构思:仿生魔鬼鱼样本采集器,以大自然的魔鬼鱼为原型,为了解决大多数螺旋桨为动力的微型采集器在复杂的水域中难以执行采集样本作业的目的而设计的采集装置机器人。用于采集环境样品或者解决小型水域富营养化问题。该机器人最外层材料以类鲨鱼皮材料作为我们的“鱼鳍”。尾端是个摆动装置,方向舵。
经过长达2小时的汇报本次校赛落下帷幕,感谢各位参赛选手在校赛的精彩表现!


